- жөҸи§Ҳ: 11386757 ж¬Ў
-

ж–Үз« еҲҶзұ»
зӨҫеҢәзүҲеқ—
- жҲ‘зҡ„иө„и®Ҝ ( 0)
- жҲ‘зҡ„и®әеқӣ ( 0)
- жҲ‘зҡ„й—®зӯ” ( 0)
еӯҳжЎЈеҲҶзұ»
- 2012-08 ( 1467)
- 2012-07 ( 1872)
- 2012-06 ( 1125)
- жӣҙеӨҡеӯҳжЎЈ...
жңҖж–°иҜ„и®ә
-
wahahachuang8пјҡ
жҲ‘и§үеҫ—иҝҷз§ҚдёңиҘҝиҮӘе·ұејҖеҸ‘еӨӘйә»зғҰдәҶпјҢе°ұеҲ«иҮӘе·ұжҚЈйј“дәҶпјҢжүҫдёӘ第дёүж–№пјҢж–№ ...
WebSocketе’Ңnode.js -
xhpscdxпјҡ
еҶҷзҡ„иҝҷд№ҲиҜҰз»ҶпјҢе…ЁйқўпјҢеҜ№жһ¶жһ„еёҲзҡ„е·ҘдҪңиҒҢиҙЈпјҢдёӘдәәиғҪеҠӣйғҪиҝӣиЎҢдәҶжўізҗҶгҖӮ ...
жһ¶жһ„еёҲд№Ӣи·Ҝ---зҺӢжіҪе®ҫи°Ҳжһ¶жһ„еёҲзҡ„иҒҢиҙЈ -
xgbzscпјҡ
жҳҜhttp://www.haoservice.com еҗ—пјҹ
android WIFIе®ҡдҪҚ -
leheheпјҡ
http://www.haoservice.com/docs/ ...
android WIFIе®ҡдҪҚ -
leheheпјҡ
http://www.haoservice.com/docs/ ...
android WIFIе®ҡдҪҚ
uartдёІеҸЈеҸ‘йҖҒ---йӮЈдәӣе№ҙжҲ‘们дёҖиө·зҺ©mini2440(arm9)иЈёжңә
Uartе·ҘдҪңеҺҹзҗҶпјҡ
ж•°жҚ®йҖҡдҝЎж–№ејҸдёәпјҡ并иЎҢйҖҡдҝЎдёҺдёІиЎҢйҖҡдҝЎдёӨз§Қ:
§并иЎҢйҖҡдҝЎ:еҲ©з”ЁеӨҡжқЎж•°жҚ®зәҝе°Ҷж•°жҚ®зҡ„еҗ„дҪҚеҗҢж—¶дј йҖҒгҖӮ
е®ғзҡ„зү№зӮ№жҳҜпјҡдј иҫ“йҖҹеәҰеҝ«пјҢжҳҜз”ЁдәҺзҹӯи·қзҰ»йҖҡдҝЎпјӣ
В§дёІиЎҢйҖҡдҝЎпјҡеҲ©з”ЁдёҖжқЎж•°жҚ®зәҝе°Ҷж•°жҚ®дёҖдҪҚдҪҚең°йЎәеәҸдј йҖҒгҖӮ
зү№зӮ№жҳҜйҖҡдҝЎзәҝи·Ҝз®ҖеҚ•пјҢеҲ©з”Ёз®ҖеҚ•зҡ„зәҝзјҶе°ұе®һзҺ°йҖҡдҝЎпјҢдҪҺжҲҗжң¬пјҢжҳҜз”ЁдәҺиҝңи·қзҰ»йҖҡдҝЎгҖӮ
ејӮжӯҘйҖҡдҝЎпјҡ
ВӘејӮжӯҘйҖҡдҝЎпјҡд»ҘдёҖдёӘеӯ—з¬Ұдёәдј иҫ“еҚ•дҪҚпјҢйҖҡиҝҮдёӨдёӘеӯ—з¬Ұй—ҙзҡ„ж—¶й—ҙй—ҙйҡ”жҳҜдёҚеӣәе®ҡзҡ„пјҢ然иҖҢеҗҢдёҖеӯ—з¬Ұдёӯзҡ„дёӨдёӘзӣёйӮ»дҪҚд№Ӣй—ҙзҡ„ж—¶й—ҙй—ҙйҡ”жҳҜеӣәе®ҡзҡ„гҖӮ
ВӘйҖҡдҝЎеҚҸи®®пјҡжҳҜжҢҮйҖҡдҝЎеҸҢж–№зәҰе®ҡзҡ„дёҖдәӣ规еҲҷгҖӮеңЁејӮжӯҘйҖҡи®Ҝж—¶пјҢеҜ№ж•°жҚ®ж јејҸжңүеҰӮдёӢзәҰе®ҡпјҡ规е®ҡжңүз©әй—ІдҪҚгҖҒиө·е§ӢдҪҚгҖҒиө„ж–ҷдҪҚгҖҒеҘҮеҒ¶ж ЎйӘҢдҪҚгҖҒеҒңжӯўдҪҚгҖӮ
иө·е§ӢдҪҚпјҡе…ҲеҸ‘дёҖдёӘйҖ»иҫ‘вҖң0вҖқдҝЎеҸ·пјҢиЎЁзӨәдј иҫ“еӯ—з¬Ұзҡ„ејҖе§Ӣпјӣ
ж•°жҚ®дҪҚпјҡзҙ§жҺҘеңЁиө·е§ӢдҪҚд№ӢеҗҺгҖӮж•°жҚ®дҪҚзҡ„дёӘж•°еҸҜд»ҘжҳҜ4гҖҒ5гҖҒ6гҖҒ7гҖҒ8зӯүпјҢд»ҺжңҖдҪҺдҪҚејҖе§Ӣдј йҖҒпјҢйқ ж—¶й’ҹе®ҡдҪҚгҖӮ
еҘҮеҒ¶ж ЎйӘҢдҪҚпјҡж•°жҚ®дҪҚеҠ дёҠиҝҷдёҖдҪҚеҗҺпјҢдҪҝеҫ—вҖң1вҖқзҡ„дҪҚж•°еә”дёәеҒ¶ж•°пјҲеҒ¶ж ЎйӘҢпјүжҲ–пјҲеҘҮж ЎйӘҢпјүпјҢд»ҘжӯӨж ЎйӘҢж•°жҚ®дј йҖҒзҡ„жӯЈзЎ®жҖ§гҖӮ
еҒңжӯўдҪҚпјҡе®ғжҳҜдёҖдёӘеӯ—з¬Ұж•°жҚ®зҡ„з»“жқҹж Үеҝ—гҖӮ
з©әй—ІдҪҚпјҡеӨ„дәҺйҖ»иҫ‘вҖң1вҖқзҠ¶жҖҒпјҢиЎЁзӨәеҪ“еүҚзәҝи·ҜжІЎжңүж•°жҚ®дј йҖҒгҖӮ
жіўзү№зҺҮпјҡ
жҳҜиЎЎйҮҸж•°жҚ®дј йҖҒзҺҮзҡ„жҢҮж Үпјҡи®°еҪ•жҜҸз§’дёӯдј йҖҒзҡ„дәҢиҝӣеҲ¶дҪҚж•°гҖӮдҫӢеҰӮпјҡж•°жҚ®дј йҖҒйҖҹзҺҮдёә120еӯ—з¬ҰгҖҒжҜҸз§’гҖӮиҖҢжҜҸдёҖдёӘеӯ—з¬Ұдёә10дҪҚпјҢеҲҷе…¶дј йҖҒзҡ„жіўзү№зҺҮдёә10*120=1200дҪҚ/з§’=1200жіўзү№зҺҮ
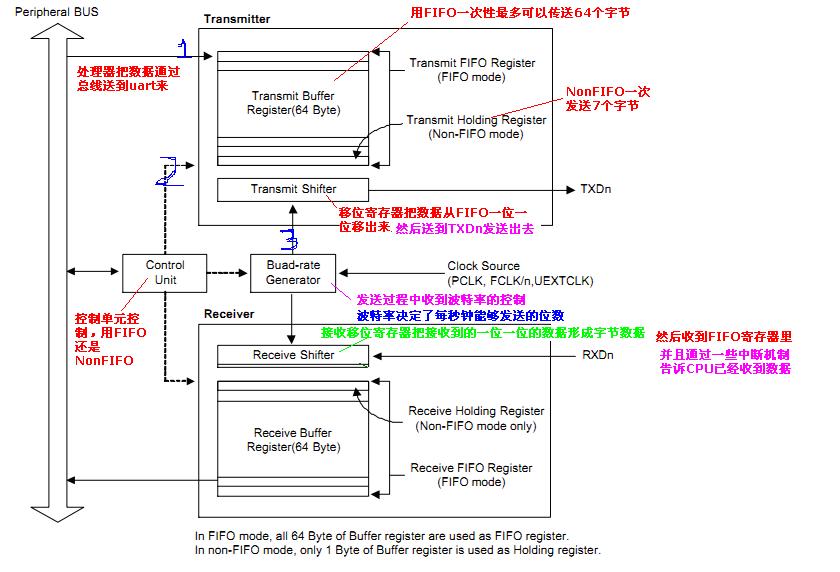
UARTеҹәжң¬еҺҹзҗҶ
йҖҡз”ЁејӮжӯҘ收еҸ‘еҷЁпјҢз®Җз§°UART,еҚівҖңUniversal Asynchronous Receiver TransmitterвҖқ,е®ғз”ЁжқҘдј иҫ“дёІиЎҢж•°жҚ®пјӣ
еҸ‘йҖҒж•°жҚ®ж—¶пјҡ
CPUе°Ҷ并иЎҢж•°жҚ®еҶҷе…ҘUARTпјҢUARTжҢүз…§дёҖе®ҡзҡ„ж јејҸеңЁдёҖж №з”өзәҝдёҠдёІиЎҢеҸ‘еҮәпјӣ
жҺҘ收数жҚ®ж—¶пјҡ
UARTжЈҖжөӢеҸҰдёҖж №з”өзәҝдёҠзҡ„дҝЎеҸ·пјҢе°ҶдёІиЎҢж•°жҚ®ж”ҫеңЁзј“еҶІеҢәдёӯпјҢCPUеҸҜиҜ»еҸ–UARTиҺ·еҫ—зҡ„иҝҷдәӣж•°жҚ®гҖӮ
UARTй©ұеҠЁзЁӢеәҸи®ҫи®Ў
UARTеҲқе§ӢеҢ–пјҡ1.еҸ‘йҖҒж•°жҚ®пјӣ2.жҺҘ收数жҚ®пјӣ
UARTеҲқе§ӢеҢ–пјҡ1.и®ҫзҪ®жіўзү№зҺҮпјӣ 2.и®ҫзҪ®ж•°жҚ®дј иҫ“ж јејҸпјӣ3.йҖүжӢ©йҖҡйҒ“е·ҘдҪңжЁЎејҸпјӣ
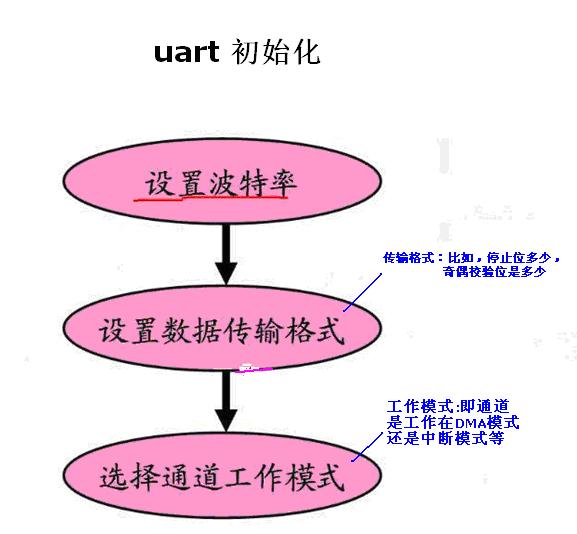
дёҖпјҺи®ҫзҪ®жіўзү№зҺҮпјҡпјҲUBRDIVпјү
еңЁs3c2440дёӯпјҢйҖҡиҝҮUBRDIV(p352)еҜ„еӯҳеҷЁеҸҜд»Ҙи®ҫе®ҡUARTзҡ„жіўзү№зҺҮгҖӮUart0гҖҒUart1гҖҒUart2еҲҶеҲ«еҜ№еә”UBRDIV0пјҢUBRDIV1гҖҒUBRDIV2
еҲ°еә•UBRDIVеҜ„еӯҳеҷЁдёӯзҡ„еҖјдёҺжіўзү№зҺҮжңүдҪ•е…ізі»пјҹ
UBRDIV=(int)пјҲUART clock/ (buad rate *16)пјү-1
пјҲUART clockпјҡPCLK or FCLK/ n or UEXTCLKпјү
еҰӮжіўзү№зҺҮдёә115200bpsпјҢUARTж—¶й’ҹдёә40MHZ
UBRDIV =(int) (40MHZ /(115200*16))-1
дәҢпјҺи®ҫзҪ®ж•°жҚ®дј иҫ“ж јејҸпјҲULCONпјү
еңЁs3c2440дёӯпјҢйҖҡиҝҮULCON(page341)пјҢеҸҜд»Ҙи®ҫзҪ®дј иҫ“ж јејҸпјҲжңүеӨҡе°‘дёӘж•°жҚ®дҪҚгҖҒжҳҜеҗҰдҪҝз”Ёж ЎйӘҢдҪҚгҖҒжҳҜеҘҮж ЎйӘҢиҝҳжҳҜеҒ¶ж ЎйӘҢпјҢжңүеӨҡе°‘дёӘеҒңжӯўдҪҚгҖҒжҳҜеҗҰдҪҝз”ЁжөҒйҮҸжҺ§еҲ¶пјү
Uart0гҖҒUart1гҖҒUart2еҲҶеҲ«еҜ№еә”ULCON0гҖҒULCON1гҖҒULCON2.
дёүпјҺи®ҫзҪ®йҖҡйҒ“е·ҘдҪңжЁЎејҸпјҲUCONпјү
еңЁs3c2440дёӯпјҢйҖҡиҝҮUCON(page342)пјҢеҸҜд»Ҙи®ҫзҪ®UARTйҖҡйҒ“зҡ„е·ҘдҪңжЁЎејҸпјҢпјҲдёӯж–ӯжЁЎејҸгҖҒжҹҘиҜўжЁЎејҸгҖҒжҲ–DMAжЁЎејҸпјү
Uart0гҖҒUart1гҖҒUart2еҲҶеҲ«еҜ№еә”UCON0гҖҒUCON1гҖҒUCON2.
иҝҷдёүжӯҘйғҪеұһдәҺеҲқе§ӢеҢ–пјҡеҲқе§ӢеҢ–е®ҢжҲҗд№ӢеҗҺГ еҸ‘йҖҒжҲ–/жҺҘ收数жҚ®
еҸ‘йҖҒж•°жҚ®пјҡ
е°ҶиҰҒеҸ‘йҖҒзҡ„ж•°жҚ®еҶҷUTXHn, UARTдјҡе°ҶдҝқеӯҳеҲ°зј“еҶІеҢәдёӯпјҢ并иҮӘеҠЁеҸ‘еҮәеҺ»гҖӮ
UTXH0гҖҒUTXH1гҖҒUTXH2
жҺҘ收数жҚ®пјҡ
еҪ“UART收еҲ°ж•°жҚ®ж—¶пјҲUTRSTATnеҜ„еӯҳеҷЁbit[0]иў«зҪ®1пјүпјҢCPUиҜ»еҸ–URXHnеҜ„еӯҳеҷЁпјҢеҚіеҸҜиҺ·еҫ—ж•°жҚ®гҖӮ
URXH0гҖҒURXH1гҖҒURXH2еҜ„еӯҳеҷЁдёӯиҜ»еҸ–ж•°жҚ®
Main.c
#define GLOBAL_CLK 1
#include <stdlib.h>
#include <string.h>
#include "def.h"
#include "option.h"
#include "2440addr.h"
#include "2440lib.h"
#include "2440slib.h"
#include "mmu.h"
#include "profile.h"
#include "memtest.h"
static void cal_cpu_bus_clk(void);
void Set_Clk(void);
/*************************************************
Function name: delay
Parameter : times
Description :延时еҮҪж•°
Return : void
Argument : void
Autor & date : Daniel
**************************************************/
void delay(int times)
{
int i,j;
for(i=0;i<times;i++)
for(j=0;j<400;j++);
}
/*************************************************
Function name: Main
Parameter : void
Description : дё»еҠҹиғҪеҮҪж•°,е®һзҺ°дәҶдёІеҸЈзҡ„收еҸ‘еҠҹиғҪ
йҰ–е…ҲжғідёІеҸЈеҸ‘йҖҒеҚҒж¬ЎвҖңhello worldвҖқпјҢ
Return : void
Argument : void
Autor & date : Daniel
**************************************************/
void Main(void)
{
int i;
int Scom=0;
Set_Clk();
beep_init();
/*и®ҫзҪ®жіўзү№зҺҮгҖҒж•°жҚ®дҪҚгҖҒеҒңжӯўдҪҚгҖҒж ЎйӘҢдҪҚ*/
Uart_Init(0,115200);
Uart_Select(Scom);
for(i=0;i<10;i++)
Uart_Printf("\nHello World!\n");
while(1)
{
while(Uart_GetKey()=='r')
{
for(i=0;i<10;i++)
beep_run();
Uart_Printf("\nBeep Quit!\n");
}
}
}
/*************************************************
Function name: Set_Clk()
Parameter : void
Description : и®ҫзҪ®CPUзҡ„ж—¶й’ҹйў‘зҺҮ
Return : void
Argument : void
Autor & date : Daniel
**************************************************/
void Set_Clk(void)
{
int i;
U8 key;
U32 mpll_val = 0 ;
i = 2 ; //don't use 100M!
//boot_params.cpu_clk.val = 3;
switch ( i ) {
case 0: //200
key = 12;
mpll_val = (92<<12)|(4<<4)|(1);
break;
case 1: //300
key = 13;
mpll_val = (67<<12)|(1<<4)|(1);
break;
case 2: //400
key = 14;
mpll_val = (92<<12)|(1<<4)|(1);
break;
case 3: //440!!!
key = 14;
mpll_val = (102<<12)|(1<<4)|(1);
break;
default:
key = 14;
mpll_val = (92<<12)|(1<<4)|(1);
break;
}
//init FCLK=400M, so change MPLL first
ChangeMPllValue((mpll_val>>12)&0xff, (mpll_val>>4)&0x3f, mpll_val&3); //set the register--rMPLLCON
ChangeClockDivider(key, 12); //the result of rCLKDIVN [0:1:0:1] 3-0 bit
cal_cpu_bus_clk(); //HCLK=100M PCLK=50M
}
/*************************************************
Function name: cal_cpu_bus_clk
Parameter : void
Description : и®ҫзҪ®PCLK\HCLK\FCLKзҡ„йў‘зҺҮ
Return : void
Argument : void
Autor & date : Daniel
**************************************************/
static void cal_cpu_bus_clk(void)
{
static U32 cpu_freq;
static U32 UPLL;
U32 val;
U8 m, p, s;
val = rMPLLCON;
m = (val>>12)&0xff;
p = (val>>4)&0x3f;
s = val&3;
//(m+8)*FIN*2дёҚиҰҒи¶…еҮә32дҪҚж•°!
FCLK = ((m+8)*(FIN/100)*2)/((p+2)*(1<<s))*100; //FCLK=400M FIN=12000000
val = rCLKDIVN;
m = (val>>1)&3;
p = val&1;
val = rCAMDIVN;
s = val>>8;
switch (m) {
case 0:
HCLK = FCLK;
break;
case 1:
HCLK = FCLK>>1;
break;
case 2:
if(s&2)
HCLK = FCLK>>3;
else
HCLK = FCLK>>2;
break;
case 3:
if(s&1)
HCLK = FCLK/6;
else
HCLK = FCLK/3;
break;
}
if(p)
PCLK = HCLK>>1;
else
PCLK = HCLK;
if(s&0x10)
cpu_freq = HCLK;
else
cpu_freq = FCLK;
val = rUPLLCON;
m = (val>>12)&0xff;
p = (val>>4)&0x3f;
s = val&3;
UPLL = ((m+8)*FIN)/((p+2)*(1<<s));
UCLK = (rCLKDIVN&8)?(UPLL>>1):UPLL;
}
2440lib.c
#include "def.h"
#include "option.h"
#include "2440addr.h"
#include "2440lib.h"
#include "2440slib.h"
#include <stdarg.h>
#include <string.h>
#include <stdlib.h>
#include <stdio.h>
#include <ctype.h>
static int whichUart=0;
void Port_Init0(void) //IOз«ҜеҸЈеҲқе§ӢеҢ–
{
//*** PORT H GROUP
//Ports : GPH10 GPH9 GPH8 GPH7 GPH6 GPH5 GPH4 GPH3 GPH2 GPH1 GPH0 //Signal : CLKOUT1 CLKOUT0 UCLK nCTS1 nRTS1 RXD1 TXD1 RXD0 TXD0 nRTS0 nCTS0
//Binary : 10 , 10 10 , 11 11 , 10 10 , 10 10 , 10 10
rGPHCON = 0x00faaa;
rGPHUP = 0x7ff; // The pull up function is disabled GPH[10:0]
}
void Uart_Init(int pclk,int baud)
{
int i;
if(pclk == 0)
pclk = PCLK;
rUFCON0 = 0x0; //UART channel 0 FIFO control register, FIFO disable
rUMCON0 = 0x0; //UART chaneel 0 MODEM control register, AFC disable(AFC:жөҒйҮҸжҺ§еҲ¶)
//UART0
rULCON0 = 0x3; //Line control register : Normal,No parity,1 stop,8 bits
// [10] [9] [8] [7] [6] [5] [4] [3:2] [1:0]
// Clock Sel, Tx Int, Rx Int, Rx Time Out, Rx err, Loop-back, Send break, Transmit Mode, Receive Mode
// 0 1 0 , 0 1 0 0 , 01 01
// PCLK Level Pulse Disable Generate Normal Normal Interrupt or Polling
rUCON0 = 0x245; // Control register
rUBRDIV0=( (int)(pclk/16./baud+0.5) -1 ); //Baud rate divisior register 0
for(i=0;i<100;i++);
}
//===================================================================
void Uart_Select(int ch)
{
whichUart = ch;
}
//=====================================================================
void Uart_SendByte(int data)
{
if(whichUart==0)
{
if(data=='\n')
{
while(!(rUTRSTAT0 & 0x2));
// Delay(1); //because the slow response of hyper_terminal
WrUTXH0('\r');
}
while(!(rUTRSTAT0 & 0x2)); //дёҚдёәжҚўиЎҢз¬Ұж—¶пјҢWait until THR is empty.
// Delay(1);
WrUTXH0(data);//еҫҖеҜ„еӯҳеҷЁеҶҷж•°жҚ®
}
else if(whichUart==1)
{
if(data=='\n')
{
while(!(rUTRSTAT1 & 0x2));
//Delay(1); //because the slow response of hyper_terminal
rUTXH1 = '\r';
}
while(!(rUTRSTAT1 & 0x2)); //Wait until THR is empty.
//Delay(1);
rUTXH1 = data;
}
else if(whichUart==2)
{
if(data=='\n')
{
while(!(rUTRSTAT2 & 0x2));
//Delay(1); //because the slow response of hyper_terminal
rUTXH2 = '\r';
}
while(!(rUTRSTAT2 & 0x2)); //Wait until THR is empty.
//Delay(1);
rUTXH2 = data;
}
}
//====================================================================
void Uart_SendString(char *pt)
{
while(*pt)
Uart_SendByte(*pt++);
}
//=====================================================================
//If you don't use vsprintf(), the code size is reduced very much.
void Uart_Printf(char *fmt,...)
{
va_list ap;
char string[256];
va_start(ap,fmt);//va_startгҖҒ va_endжҲҗеҜ№еҮәзҺ°пјҢapжҢҮеҗ‘fmtд№ӢеҗҺзҡ„еҸӮж•°
vsprintf(string,fmt,ap);//жҠҠapд№ӢеҗҺзҡ„еҸӮж•°жӢ·иҙқиҝӣstring
Uart_SendString(string);
va_end(ap);
}
дёӯж–ӯж–№ејҸпјҢдёІеҸЈеҸ‘йҖҒпјҡ
#define GLOBAL_CLK 1
#include <stdlib.h>
#include <string.h>
#include "def.h"
#include "option.h"
#include "2440addr.h"
#include "2440lib.h"
#include "2440slib.h"
#include "mmu.h"
#include "profile.h"
#include "memtest.h"
void Uart0INT_init(void);
static void __irq IRQ_ISR_UART0(void);
void Set_Clk(void);
static void cal_cpu_bus_clk(void);
/*************************************************
Function name: delay
Parameter : times
Description : 延时еҮҪж•°
Return : void
Argument : void
Autor & date : Daniel
**************************************************/
void delay(int times)
{
int i,j;
for(i=0;i<times;i++)
for(j=0;j<400;j++);
}
/*************************************************
Function name: Main
Parameter : void
Description : дё»еҠҹиғҪеҮҪж•°
Return : void
Argument : void
Autor & date : Daniel
**************************************************/
int Main(void)
{
Set_Clk();
MMU_Init();
Uart0INT_init();
return 0 ;
}
/*************************************************
Function name: Uart0INT_init()
Parameter : void
Description : дёӯж–ӯеҲқе§ӢеҢ–еҮҪж•°пјҢз”ЁдәҺй…ҚзҪ®дёӯж–ӯжүҖйңҖиҰҒзҡ„
еҮ дёӘеҜ„еӯҳеҷЁ
Return : void
Argument : void
Autor & date : Daniel
**************************************************/
void Uart0INT_init(void)
{
Uart_Init( 0,115200);
Uart_Select(0);
rPRIORITY = 0x00000000; /*й»ҳи®Өдјҳе…Ҳзә§*/
rINTMOD = 0x00000000; /*й»ҳи®ӨIRQдёӯж–ӯ*/
/*жё…дёӯж–ӯ*/
ClearSubPending(BIT_SUB_RXD0);
ClearPending(BIT_UART0);
/*и®ҫзҪ®UARTзҡ„ISR*/
pISR_UART0 = (U32)IRQ_ISR_UART0;
EnableIrq(BIT_UART0);
EnableSubIrq(BIT_SUB_RXD0);
}
/*************************************************
Function name: IRQ_ISR_UART0()
Parameter : void
Description : дёӯж–ӯжңҚеҠЎеӯҗзЁӢеәҸпјҢиҜҘеӯҗзЁӢеәҸзҡ„дҪңз”Ёе°ұжҳҜжҠҠ
дёІеҸЈж”¶еҲ°зҡ„ж•°жҚ®еҸ‘йҖҒеҲ°и¶…зә§з»Ҳз«ҜгҖӮ
Return : void
Argument : void
Autor & date : Daniel
**************************************************/
static void __irq IRQ_ISR_UART0(void)
{
if(rSUBSRCPND & 0x1)
{
rUTXH0 = rURXH0; /*иҝҷйҮҢжІЎиҖғиҷ‘еӣһиҪҰ*/
ClearSubPending(BIT_SUB_RXD0);
}
ClearPending(BIT_UART0);
}
/*************************************************
Function name: Set_Clk()
Parameter : void
Description : и®ҫзҪ®CPUзҡ„ж—¶й’ҹйў‘зҺҮ
Return : void
Argument : void
Autor & date : Daniel
**************************************************/
void Set_Clk(void)
{
int i;
U8 key;
U32 mpll_val = 0 ;
i = 2 ; //don't use 100M!
//boot_params.cpu_clk.val = 3;
switch ( i ) {
case 0: //200
key = 12;
mpll_val = (92<<12)|(4<<4)|(1);
break;
case 1: //300
key = 13;
mpll_val = (67<<12)|(1<<4)|(1);
break;
case 2: //400
key = 14;
mpll_val = (92<<12)|(1<<4)|(1);
break;
case 3: //440!!!
key = 14;
mpll_val = (102<<12)|(1<<4)|(1);
break;
default:
key = 14;
mpll_val = (92<<12)|(1<<4)|(1);
break;
}
//init FCLK=400M, so change MPLL first
ChangeMPllValue((mpll_val>>12)&0xff, (mpll_val>>4)&0x3f, mpll_val&3); //set the register--rMPLLCON
ChangeClockDivider(key, 12); //the result of rCLKDIVN [0:1:0:1] 3-0 bit
cal_cpu_bus_clk(); //HCLK=100M PCLK=50M
}
/*************************************************
Function name: cal_cpu_bus_clk
Parameter : void
Description : и®ҫзҪ®PCLK\HCLK\FCLKзҡ„йў‘зҺҮ
Return : void
Argument : void
Autor & date : Daniel
**************************************************/
static void cal_cpu_bus_clk(void)
{
static U32 cpu_freq;
static U32 UPLL;
U32 val;
U8 m, p, s;
val = rMPLLCON;
m = (val>>12)&0xff;
p = (val>>4)&0x3f;
s = val&3;
//(m+8)*FIN*2дёҚиҰҒи¶…еҮә32дҪҚж•°!
FCLK = ((m+8)*(FIN/100)*2)/((p+2)*(1<<s))*100; //FCLK=400M FIN=12000000
val = rCLKDIVN;
m = (val>>1)&3;
p = val&1;
val = rCAMDIVN;
s = val>>8;
switch (m) {
case 0:
HCLK = FCLK;
break;
case 1:
HCLK = FCLK>>1;
break;
case 2:
if(s&2)
HCLK = FCLK>>3;
else
HCLK = FCLK>>2;
break;
case 3:
if(s&1)
HCLK = FCLK/6;
else
HCLK = FCLK/3;
break;
}
if(p)
PCLK = HCLK>>1;
else
PCLK = HCLK;
if(s&0x10)
cpu_freq = HCLK;
else
cpu_freq = FCLK;
val = rUPLLCON;
m = (val>>12)&0xff;
p = (val>>4)&0x3f;
s = val&3;
UPLL = ((m+8)*FIN)/((p+2)*(1<<s));
UCLK = (rCLKDIVN&8)?(UPLL>>1):UPLL;
}


- 2012-06-29 20:06
- жөҸи§Ҳ 1211
- иҜ„и®ә(0)
- жҹҘзңӢжӣҙеӨҡ
еҸ‘иЎЁиҜ„и®ә

зӣёе…іжҺЁиҚҗ
mini2440 зҡ„uartиЈёжңәзЁӢеәҸпјҢе·ІеңЁејҖеҸҚжқҝдёҠйҖҡиҝҮи°ғиҜ•еҸҜиҝҗиЎҢ
mini2440 mdk uart иЈёжңәзЁӢеәҸ
е®ҢжҲҗmini2440иЈёжңәдёІеҸЈеҠҹиғҪпјҢи°ғиҜ•е®ҢеҗҺз”ЁoflashдёӢиҪҪгҖӮ
mini2440дёӢзҡ„еҹәдәҺMDKзҡ„uartиЈёжңәе®һйӘҢпјҢеҸӘжҳҜе®һзҺ°ж”¶еҸ‘дёҖдёӘеӯ—з¬ҰпјҢйҖӮеҗҲе…Ҙй—ЁпјҢе…·дҪ“и®Іи§ЈзңӢеҚҡе®ўпјҡhttp://blog.csdn.net/mybelief321/article/details/8931064
mini2440 иЈёжңә е®ҡж—¶еҷЁе’ҢUARTеҗҢж—¶дёӯж–ӯзҡ„зЁӢеәҸгҖӮиҮӘе·ұеҶҷзҡ„пјҢеҸҜд»ҘеңЁnandдёӯиҝҗиЎҢгҖӮдёӯж–ӯеҸ‘з”ҹж—¶дјҡжңүеҗ„жңүLEDй—ӘзғҒгҖӮеёҢжңӣеҸҜд»ҘеҜ№еҗ„дҪҚжңүеё®еҠ©
ж ‘иҺ“жҙҫ3дёҠз”ЁжҲ·зӣ®еүҚж— жі•жӯЈеёёжҳҜдҪҝз”ЁGPIOдёӯзҡ„UARTдёІеҸЈ(GPIO14&GPIO15;),д№ҹе°ұжҳҜиҜҙз”ЁжҲ·ж— и®әжҳҜжғіз”ЁдёІеҸЈжқҘи°ғиҜ•ж ‘иҺ“жҙҫпјҢиҝҳжҳҜжғіз”ЁGPIOдёӯзҡ„дёІеҸЈжқҘиҝһжҺҘGPSпјҢи“қзүҷпјҢXBEEзӯүзӯүдёІеҸЈеӨ–и®ҫзӣ®еүҚйғҪжҳҜжңүй—®йўҳзҡ„гҖӮ еҺҹеӣ жҳҜж ‘иҺ“жҙҫCPUеҶ…йғЁжңүдёӨ...
иҜҰз»Ҷд»Ӣз»ҚдәҶдёІеҸЈйҖҡдҝЎзҡ„зӣёе…іжҰӮеҝөпјҢеҢ…жӢ¬пјҡ并иЎҢйҖҡдҝЎе’ҢдёІиЎҢйҖҡдҝЎжҰӮеҝөпјҢеҚ•е·ҘйҖҡдҝЎпјҢеҚҠеҸҢе·ҘйҖҡдҝЎпјҢеҸҢе·ҘйҖҡдҝЎдёүз§ҚдёІиЎҢйҖҡдҝЎеҲ¶ејҸпјҢејӮжӯҘдёІиЎҢйҖҡдҝЎпјҢеҗҢжӯҘдёІиЎҢйҖҡдҝЎпјӣUART-RS232-RS422-RS485пјҢ并д»ҘRS232жҺҘ收模еқ—дёәдҫӢпјҢз”ЁVerilogHDLиҜӯиЁҖ...
mini2440иЈёжңәиҜ•зӮјд№ӢвҖ”вҖ”DMAзӣҙжҺҘеӯҳеҸ– е®һзҺ°UartпјҲдёІеҸЈпјүйҖҡдҝЎ
mini2440-bsp-uartпјҢMINI2440ејҖеҸ‘жқҝдёІеҸЈйҖҡдҝЎ
дёІеҸЈDMAж–№ејҸеҸ‘йҖҒж•°жҚ®MINI2440UartDma
mini2440дёӢи°ғиҜ•йҖҡиҝҮзҡ„дёІеҸЈж”¶еҸ‘зЁӢеәҸ
дҪңиҖ…е°ҶжҺЁеҮәгҖҠARM9иЈёжңәејҖеҸ‘зі»еҲ—гҖӢпјҢеҗ„з§ҚARM9еҠҹиғҪйғЁд»¶ејҖеҸ‘еә”з”Ёзҡ„жҺҘеҸЈеҸҠе®Ңж•ҙзЁӢеәҸи®Іи§ЈгҖӮеҢ…жӢ¬пјҡпјҲARM9зҡ„е…ЁйғЁеҠҹиғҪйғЁд»¶пјүеӨ–йғЁдёӯж–ӯгҖҒе®ҡж—¶еҷЁгҖҒзңӢй—ЁзӢ—гҖҒDMAгҖҒPWMжҺ§еҲ¶гҖҒUARTйҖҡдҝЎгҖҒзәўеӨ–жЁЎеқ—жҺ§еҲ¶гҖҒе®һж—¶ж—¶й’ҹжҺ§еҲ¶гҖҒIICжҖ»зәҝеә”з”ЁгҖҒNor...
еҹәдәҺmini2440ејҖеҸ‘жқҝдёӢзҡ„дёІеҸЈиҜ»еҶҷеӯ—жҜҚзЁӢеәҸпјҢе·Із»ҸеңЁADS1.2дёҠиҝҗиЎҢиҝҮдәҶгҖӮ
armдёҠзҡ„дёІеҸЈе°ҸзЁӢеәҸпјҢеҢ…жӢ¬еҜ№зЎ¬д»¶зҡ„еҹәжң¬еҲқе§ӢеҢ–пјҒпјҒ
UARTйҖҡдҝЎ--еҸ‘йҖҒ1дёӘеӯ—з¬ҰдёІ ,жҳҜеңЁеҚ•зүҮжңәдёҠж“ҚдҪңзҡ„пјҢд»Јз ҒеҸҜд»ҘйЎәеҲ©и·‘йҖҡ
еҹәдәҺFT232RLи®ҫи®Ўзҡ„ USBиҪ¬UART-RS232-RS485ALTIUMи®ҫ计硬件еҺҹзҗҶеӣҫPCB+ADйӣҶжҲҗе°ҒиЈ…еә“ж–Ү件гҖӮ2еұӮжқҝи®ҫи®ЎпјҢеӨ§е°Ҹдёә80x50mmпјҢAltium Designer и®ҫи®Ўзҡ„е·ҘзЁӢж–Ү件пјҢеҢ…жӢ¬е®Ңж•ҙзҡ„еҺҹзҗҶеӣҫеҸҠPCBж–Ү件пјҢеҸҜд»Ҙз”ЁAltium(AD)иҪҜ件жү“ејҖжҲ–дҝ®ж”№пјҢе·І...
32дҪҚarm9еҫ®еӨ„зҗҶеҷЁS3C2440зҡ„uartжөӢиҜ•жәҗд»Јз Ғ
It is a UART send char project for STM32F107VC ARM micro-controllers by Dr. Barati.
mini2440uartжҳҫзӨәпјҢиЈёжңәзЁӢеәҸпјҒ
ARM9(S3C2440)д№ӢдёүдёІеҸЈUART.pdf